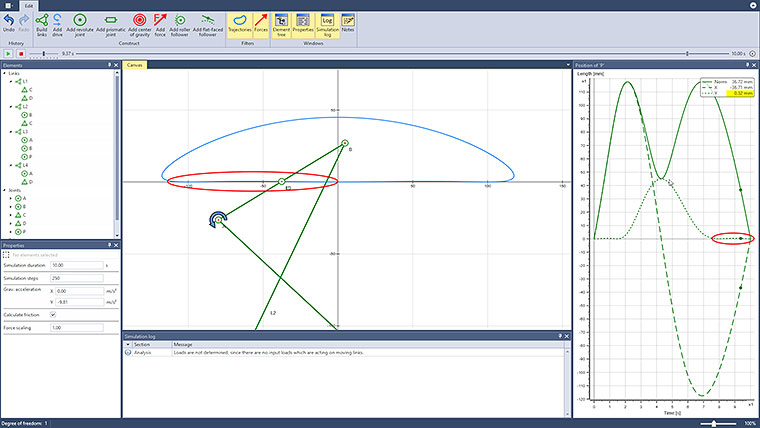
Eine durch ein Koppelgetriebe realisierte Geradführung (Lenkergeradführung) dient der Umwandlung einer Drehbewegung in eine geradlinige Bewegung. Die einfachsten Lösungen für dieses Problem bieten, wie hier, Viergelenke.
Das Verhältnis der Längen der Schwingen beträgt L1 : L2 : L3 = 4 : 5 : 2. Daraus folgt auch, dass an den beiden äußersten Punkten der Bewegung jeweils einer der beiden Lenker (L2 und L4) orthogonal auf dem Gestell steht.
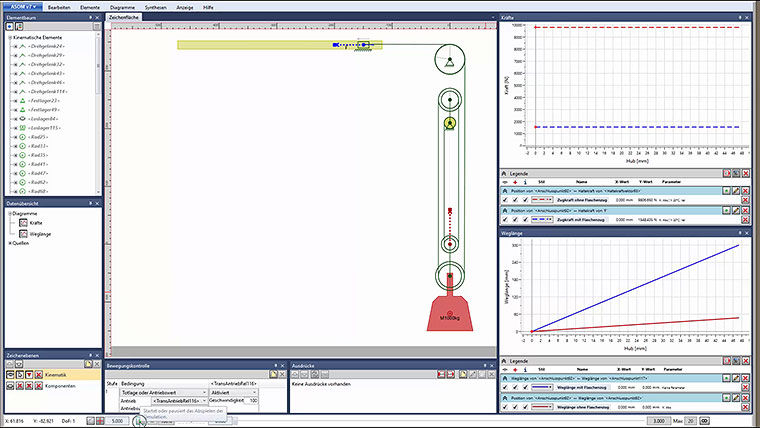
Da es sich hierbei nur um eine angenäherte Geradführung handelt, ist es sinnvoll, auch die Genauigkeit zu betrachten. Im oben gezeigten Beispiel kann man bei einer angenommenen Koppellänge von 20cm den „geraden“ Teil der Kurve durch einen Korridor von etwa 1mm Breite einschließen. Die Breite des Korridors lässt sich bei gleicher Koppellänge auf unter 0,2mm reduzieren, wenn statt dem originalen Verhältnis von 4 : 5 : 2 das Verhältnis 5 : 6,5 : 2 verwendet wird, wie im zweiten Beispiel gezeigt. Die Länge des „geraden“ Teiles der Kurve reduziert sich dafür allerdings um ca. 11{43744c794202440f614bdd815a49e21f8101affb3f7b8e3743fe0e62bc32706b}.
Die Genauigkeit der Geradführungen wird durch das Ablesen der Y-Koordinate des Punktes P verdeutlicht. Weiterführend könnten mit dem Programm auch entstehende Lagerreaktionskräfte und Reibungen analysiert und optimiert werden.